1. Arduino Uno

Arduino Uno adalah board mikrokontroler berbasis ATmega328 (datasheet). Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk menjalankannya.
2. Motor Driver
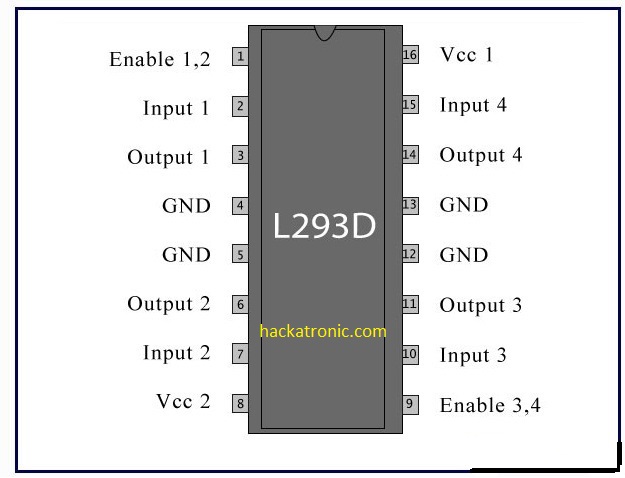
IC L293D adlah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat digunakan untuk membuat driver H-bridge untuk 2 buah motor DC.
3. Motor DC

Motor DC adalah jenis motor listrik yang penggunaannya memerlukan jenis arus DC atau arus searah. Jadi pada motor DC, arus searah yang dihasilkan nantinya akan diubah menjadi energi mekanis yang berupa putaran atau gerak.
4. Ground

Ground adalah titik kembalinya arus searah atau titik kembalinya sinyal bolak balik atau titik patokan dari berbagai titik tegangan dan sinyal listrik dalam rangkaian elektronika.

Project board ini berfungsi sebagai tempat untuk merangkai rangkaian pada percobaan praktikum, yang mana pada board ini masing-masing lobangnya ada yng berhubungan secara vertikal dan horizontal.




Pada percobaan ini menggunakan Arduino Uno sebagai mikrokontroler, dimana Pin 10 dan 9 terhubung dengan input 1 dan input 2 pada motor driver. Pada motor driver, output 1 dan output 2 terhubung pada motor dc. Pada bagian header pin 10 dan 9 arduino dideklarasikan sebagai input 1 dan 2 pada driver motor DC. Pada bagian set up fungsi pinMode () dibuat untuk mendeklarasikan in 1 dan in 2 sebagai output. Pada bagian loop fungsi digitalwrite() dibuat untuk memberikan logika 0 (LOW) atau 1 (HIGH) pada in 1 dan in 2 dan fungsi delay untuk memberikan waktu lama motor dc berputar (1 detik) dan lama motor dc dalam keadaan diam (5 detik). Fungsi digitalwrite () diatur agar dapat menghentikan motor DC dengan memberikan logika LOW pada pin in1 dan in2 , mengatur putaran motor DC ke kanan dengan memberikan logika HIGH pada pin in1 dan LOW pada pin in2, dan mengatur putaran motor DC ke kiri dengan memberikan logika LOW pada pin in1 dan HIGH pada pin in2 . Pin enable driver motor DC diberikan logika HIGH sehingga mengizinkan driver motor untuk mengatur putaran motor DC. Pada saat motor DC berputar ke kanan akan ada arus yang mengalir dari pin out1 ke motor DC dan diteruskan ke pin out2 sedangkan Pada saat motor DC berputar kiri akan ada arus yang mengalir dari pin out2 ke motor DC dan diteruskan ke pin out1. Ketika motor DC dalam keadaan diam tidak ada arus yang mengalir pada motor DC.
berikut program untuk praktikum pada percobaan 1:
6. Analisa [Kembali]
1. Analisa apa yang terjadi ketika
pin enable floating (pin dicabut)?
JAWAB :
Pada saat pin enable floating,
motor akan berhenti berputar. Pin enable berfungsi untuk mengizinkan driver
menerima perintah untuk menggerakkan motor DC. Sehingga motor akan berhenti
berputar saat pin enable floating karena pin enable memiliki kondisi yang tidak
dapat ditentukan apakah memiliki kondisi high (logika 1) atau kondisi low
(logika 0). Jadi, karena pin ini berfungsi sebagai pengontrol motor, maka saat
pin enable dicabut, motor akan mati (berhenti berputar)
2. Analisa ketika pin VSS dicabut,
apa yang terjadi pada motor?
JAWAB :
Pin VSS digunakan untuk
memberikan daya ke driver motor sehingga saat pin VSS dicabut maka tidak akan
mempengaruhi motor. Karna syarat dari motor berputar adalah adanya arus yang
mengalir dari sumber tegangan, motor, kemudian ke ground dan terdapat potensial
disana. Namun, apabila pin VS yang dicabut maka motor akan mati karena pin VS
inilah yang memberi tegangan pada motor.
3. Analisa yang terjadi jika pin
enable terhubung ke gnd!
JAWAB :
Apabila pin enable dihubungkan ke ground, maka
motor akan berhenti berputar karena saat enable terhubung ke gnd berlogika 0
(low). Pin enable ini berfungsi mengizinkan driver menerima perintah untuk
menggerakkan motor, pin enable ini akan memberikan kondisi apakah driver dapat
mengatur motor (logika 1) atau tidak (logika 0). Sehingga saat terhubung ke
ground, pin enable akan berlogika 0 yang meyebabkan motor berhenti berputar.
- Download video percobaan Klik Disini
- Download HTML Klik Disini
- Download Listing program Klik Disini
- Download datasheet driver motor L293D Klik Disini
- Download datasheet motor DC Klik Disini
- Download datasheet arduino uno Klik Disini
- Download library arduino uno Klik Disini
Tidak ada komentar:
Posting Komentar